Sixense anuncia importantes mejoras en STEM
20 JUN 2014 9:14
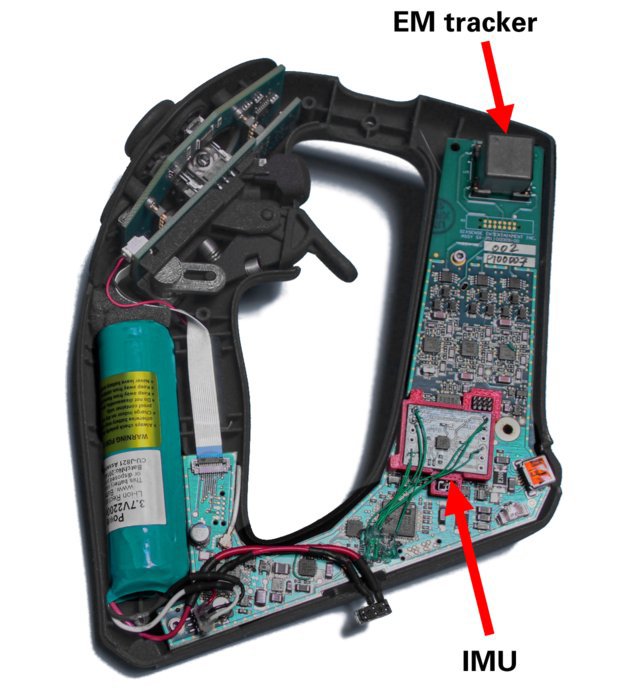
A finales de abril, Sixense anunció un retraso de tres meses para el esperado sucesor del Razer Hydra. STEM no llegará a los que apoyaron la campaña de Kickstarter hasta el mes de octubre. Además de las novedades que comentamos en su momento, hoy Sixense ha dado a conocer que los controladores y los STEM packs incluirán una unidad de medida inercial o IMU cuyos datos se fusionarán con los sensores magnéticos.
Realmente se trata de un avance muy significativo. Los que tengáis un Razer Hydra habréis podido comprobar que, en determinadas circunstancias, es un dispositivo muy sensible a las interferencias magnéticas y en ocasiones podíamos tener lecturas bastante erráticas de la posición de los mandos, especialmente cerca de altavoces y otros dispositivos. La nueva IMU de STEM junto con el algoritmo de fusión de sensores hará posible la corrección de estas distorsiones, ofreciendo una lectura precisa y exacta en cualquier circunstancia.
Sixense ha dado la oportunidad de probar las mejoras a Ben Lang y Reverend Kyle de Road to VR, quienes dan fe de las diferencias respecto a la versión anterior sin esta unidad de medida inercial. Ben afirma que le ha impresionado especialmente el posicionamiento absoluto, incluso después de sacudir con fuerza sus brazos y moviéndolos de una posición a otra. Además señala que la latencia era tan baja que fue incapaz de percibirla, la respuesta del sistema era instantánea y su avatar virtual respondía al instante a sus alocados movimientos.
Otra de las novedades de Sixense es que su SDK gratuito, denominado SixenseVR, está siendo diseñado para ser compatible con controladores de otras compañías, con lo cual podrá recibir datos de cualquier dispositivo capaz de proporcionar datos de posición y orientación, lo que abre las puertas de par en par a una integración con Control VR o incluso con los sensores de PrioVR, todo unificado en un mismo SDK. Dicho SDK también incluye una solución de cinemática inversa, que es capaz de simular la posición de los brazos y piernas mediante un sensor en cada extremidad, a diferencia por ejemplo de PrioVR que utiliza varios sensores en cada uno de nuestros miembros.
petrusboniatus
#2 20 JUN 2014 9:26
Yo creo que la prioridad del jugador es en un principio la precisión y la baja latencia, así que bravo por sixese. Si hacen buenos juegos de acción compatibles con esto yo creo que será el mejor complemento para el rift.
Eso si a ver si consiguen tener un precio bajo para que se popularice.
yombo
#3 20 JUN 2014 9:41
Me parece que Sixense ha puesto otro anuncio cobre los cambios en las modalidades del producto.
NoxWings
Visores
#4 20 JUN 2014 12:13
El problema de STEM es que ahora mismo es bastante caro, por lo demás parece una de las apuestas más sólidas hasta ahora.
kurim
#5 20 JUN 2014 13:15
Particularmente me parece una joya de periférico... para los juegos de pistolas tiene que ser la repo..a xD
Se pueden sacar juegos de series anime lo que no está escrito... os imagináis "TryGun" "Hellsing" "Evangelion" (por decir unos poquicos y conocidos) con los que tiene que ser una gozada el liarse a tiros... madreeeee xD
La verdad es que me encantaría una adaptación de alguna serie en plan cellsading, espero que no se quede en un sueño T_T
juanjosex
#6 20 JUN 2014 16:55
Me los pille hace ya bastantes meses y estoy deseando que lleguen espero no arrepentirme de la compra y que resulte que PrioVR sea mucho mejor si no D: por cierto compré el pack de los dos mandos, la base y 1 Stem mas, vamos 3 sensores :)