Hola Kaelh, en unos post anteriores comentaste que tú personalmente elegiste la fuente MODELO HP DPS-700GB A, yo te he hecho caso y he comprado dos iguales para ponerlas en serie y así conseguir los 24V que necesitan los motores valeo que tú recomendaste. Ya me han llegado las fuentes, las he puenteado para hacerlas funcionar y van perfectamente. Ahora me disponía a hacerle la modificación para aislar la tierra de continua del chasis y resulta que en el vídeo que pusiste es para la MODELO HP DPS-600PB, en ese modelo quita primero el tornillo y aisla la placa para evitar que toque el chasis, en las nuestras he probado con los cuatro tornillos de los extremos y todos dan continuidad por lo que no sé que tornillo es el que tengo que quitar, además los puentes que se cortan en la DPS-600PB, en la DPS-700GB no aparecen por lo que tampoco sé cual tengo que cortar. Te adjunto foto donde te muestro los puentes y dos de los tornillos con los que he probado.
Por cierto me acaban de llegar los motores valeo y me he llevado un chasco al ver que son usados. Es normal? Es que no lo especificaba la web en ningún momento.
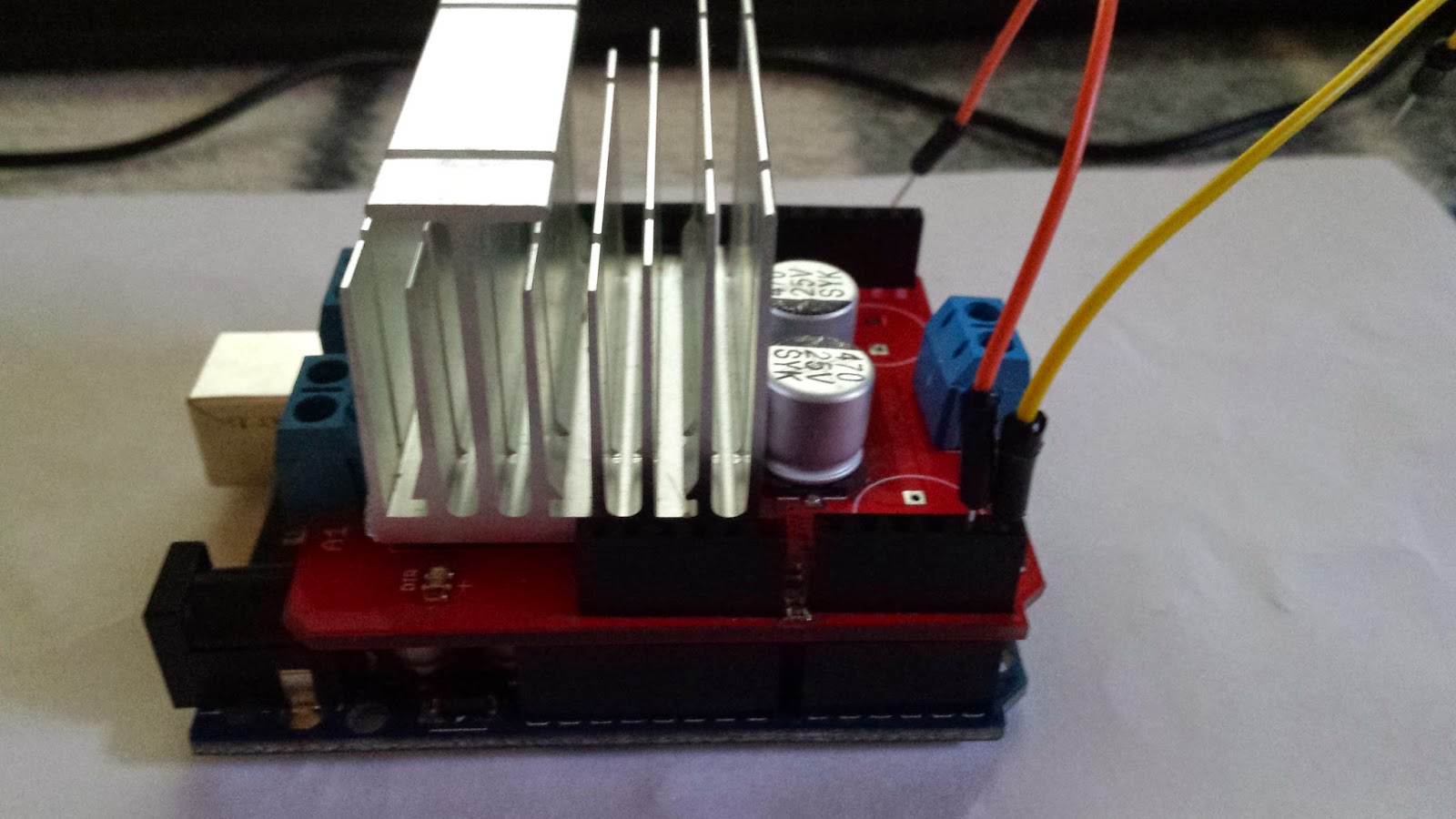
shumiHola Kaelh, en unos post anteriores comentaste que tú personalmente elegiste la fuente MODELO HP DPS-700GB A, yo te he hecho caso y he comprado dos iguales para ponerlas en serie y así conseguir los 24V que necesitan los motores valeo que tú recomendaste. Ya me han llegado las fuentes, las he puenteado para hacerlas funcionar y van perfectamente. Ahora me disponía a hacerle la modificación para aislar la tierra de continua del chasis y resulta que en el vídeo que pusiste es para la MODELO HP DPS-600PB, en ese modelo quita primero el tornillo y aisla la placa para evitar que toque el chasis, en las nuestras he probado con los cuatro tornillos de los extremos y todos dan continuidad por lo que no sé que tornillo es el que tengo que quitar, además los puentes que se cortan en la DPS-600PB, en la DPS-700GB no aparecen por lo que tampoco sé cual tengo que cortar. Te adjunto foto donde te muestro los puentes y dos de los tornillos con los que he probado.
Por cierto me acaban de llegar los motores valeo y me he llevado un chasco al ver que son usados. Es normal? Es que no lo especificaba la web en ningún momento.
Gracias
He estado probando y he llegado a la siguiente conclusión. En la DPS 600 solo había que quitar uno de los tornillos por que solo tiene la conexión al negativo (DC ground) por uno de los lados, la DPS 700 al tener dos conexiones al negativo, una por cada lado, necesita quitar los dos tornillos. Haciendo esto he conseguido que no haya continuidad entre los puntos de conexión negativo y el chasis. Lo que no sé es si hay que hacer algo más ya que en el vídeo de la DPS 600 le corta dos puentes y yo no he tenido que hacerlo. Además me ha parecido que en le vídeo decía que este aislamiento solo hay que hacérselo a una de las dos fuentes que se ponen en serie (no estoy seguro). Quizás para no complicarme, le quite los chasis a las fuentes y las fije las dos, aisladas entre si y las meta en una caja (de madera o metacrilato) con una ventilador bueno para el tema del calentamiento y de paso meter también ahí el arduino y las IBT-2
Qué pensáis de todo esto? alguien me puede ilustrar, gracias.
Por cierto me acaban de llegar los motores valeo y me he llevado un chasco al ver que son usados. Es normal? Es que no lo especificaba la web en ningún momento.
A mí cuando me llegaron tampoco tenían muy buen aspecto, el metal parecía algo envejecido. Pero cuando abrí uno para comprobarlo por dentro estaba impoluto, vamos, la bobina brillante, los engranajes totalmente blancos, la grasa sin rastro de suciedad... No sé si es debido al almacenaje o a que no gastan un duro en estética a la hora de fabricarlos, pero al final parece que sí son nuevos.
Por cierto, lo comenté en su momento, yo muevo esos dos motores con una fuente normal ATX AOpen 430W bastante antigua ya. Lo digo por si alguien no quiere complicarse demasiado la vida y le echa para atrás tener que modificar también la fuente.
Muchas gracias jjdelalamo, tendré en cuenta lo de la ATX, pero por ahora como me he gastado el dinero en las fuentes intentaré hacerlo con ellas primero. Por cierto la fuente ATX va a 12V , es mejor poner los motores a 12V o 24V?
La verdad es que los "SWF VALEO NIDEC ITT 404.458" son nuevos pese a que por fuera dan la sensanción, en su acabado, de ser usados.
Shumi:
Efectivamente yo uso la MODELO HP DPS-700GBA a 12v pero no la tengo en serie con una segunda fuente.
Yo lo tengo instalado a 12v el simulador .... y la verdad es que se mueve rápido y con fuerza.
24v es recomendable si quieres mover toda la estructura (pedales,volante,monitor) o si quieres una fuerza extra.
Quizás para no complicarme, le quite los chasis a las fuentes y las fije las dos, aisladas entre sí y las meta en una caja (de madera o metacrilato) con una ventilador bueno para el tema del calentamiento y de paso meter también ahí el arduino y las IBT-2
Puede ser lo mejor...así no tendras problemas.
Normalmente este tipo de "bricolaje" se usa mucho en el mundillo del "radio-control" para fabricar cargadores de baterías muy baratos y efectivos a 12/24v. Incluso he leído gente que las pone en "serie" sin aislar nada y les funcionan sin problemas aunque es cierto que cuanta mayor seguridad pues mejor.-
Buenas shumi. el tema de alimentar los smolka a 12 o 24 V,yo te recomiendo que ya que tienes todo para 24V lo pruebes y lo ajustes bien a tu simulador.si vas a mover todo el cockpit,sera lo mejor. si solo vas a mover el asiento,con 12 voltios y una fuente de las que tienes ye sobra,aunque a 24 voltios el simulador tiene el doble de velocidad de respuests y de fuerza. Tanta que yo he tenido que limitar el pwm al 80% por por que era hasta molesto de lo brusco que era. si lo ajustas bien el pwm y el perfil,ira como la seda.
La verdad es que los "SWF VALEO NIDEC ITT 404.458" son nuevos pese a que por fuera dan la sensanción, en su acabado, de ser usados.
Shumi:
Efectivamente yo uso la MODELO HP DPS-700GBA a 12v pero no la tengo en serie con una segunda fuente.
Yo lo tengo instalado a 12v el simulador .... y la verdad es que se mueve rápido y con fuerza.
24v es recomendable si quieres mover toda la estructura (pedales,volante,monitor) o si quieres una fuerza extra.
Quizás para no complicarme, le quite los chasis a las fuentes y las fije las dos, aisladas entre sí y las meta en una caja (de madera o metacrilato) con una ventilador bueno para el tema del calentamiento y de paso meter también ahí el arduino y las IBT-2
Puede ser lo mejor...así no tendras problemas.
Normalmente este tipo de "bricolaje" se usa mucho en el mundillo del "radio-control" para fabricar cargadores de baterías muy baratos y efectivos a 12/24v. Incluso he leído gente que las pone en "serie" sin aislar nada y les funcionan sin problemas aunque es cierto que cuanta mayor seguridad pues mejor.-
Un saludo!
Muchas gracias como siempre Kaelh, ahora me has puesto en duda, no sé si usar los motores a 12V o 24V. Yo no incluiré el volante, pedales y monitor en el movimiento, pero peso unos 85kg, quizás lo ponga a 12V por que si tú dices que van bien así y si además miro el tema del ahorro en la factura de la luz, se supone que consumiría el doble a 24V.
Por cierto, estoy casi decidido a usar potenciometro de efecto hall. Si no he entendido mal, con los ejemplos que has puesto sería simplemente sustituir el cermet por el otro no?
Muchas gracias como siempre Kaelh, ahora me has puesto en duda, no sé si usar los motores a 12V o 24V. Yo no incluiré el volante, pedales y monitor en el movimiento, pero peso unos 85kg, quizás lo ponga a 12V por que si tú dices que van bien así y si además miro el tema del ahorro en la factura de la luz, se supone que consumiría el doble a 24V.
Por cierto, estoy casi decidido a usar potenciometro de efecto hall. Si no he entendido mal, con los ejemplos que has puesto sería simplemente sustituir el cermet por el otro no?
Gracias
* Efectivamente, las conexiones son idénticas al potenciómetro mecánico de toda la vida.-
Lo que si es efectivo para afinar los potenciómetros Hall e incluso los mécanicos de toda la vida en su "señal" y eliminar lo máximo posible las "corrientes parasitarias" es instalando un "condensador" de unos 100 nanofaradios (100 nF). El compañero "Petar2" comentó que le daban buen resultado y despues de instalarlos en el mio la verdad es que se notan mucho mas finos. Necesitamos conectar tanto la patilla central del potenciómetro (señal) y como la patilla de tierra (GND) al condensador. Con esto podemos eliminar esas pequeñas vibraciones involuntarias de los motores y por lo tanto mejor calidad de la señal.-
* Como bien dice el compañero "Petar2" ya que las tienes puedes probar con 24v y luego con 12v. Así eliges cual te gusta más.
Alguien sabe modificar un firm para que coincidan los pines en un firm y en otro y poder usar ambos solo cargando el firm en cuestion?.
Lo digo por que con simtools hay un firm "SMC" que nos viene al pelo,es para arduino y valido para la monster o la ibt-2. Pero el tema es que no usa los mismos pines que el que usamos sirnoname.
Si algun entendido lo modificara para que use los mismos pines,seria tan facil como cargar el firm que queramos usar para x-sim ó simtools sin andar cambiando conexiones ni lios.
Ademas como extra este firm va preparado para controlar un 3dof y tiene interfaz de configuracion estilo prilad.
Alguien se anima a hacer la unificacion de conexionado?
Me acabo de registrar básicamente para darte las gracias Kaelh, has hecho un excelente trabajo!!! Es impresionante lo bien explicado y lo fácil de entender que lo has hecho, eres un crack!!! También agradecer a todos los que te han ayudado!!
Ya tengo todo el material pedido para hacerme uno!! A falta de que me llegue la electrónica voy empezar con la parte mecánica, y como no ya tengo mi primera duda existencial, alomejor ya lo has explicado en el foro y no lo he visto
Mi duda es saber donde es mejor aplicar la fuerza al asiento, a la altura de los hombros o directamente a la base del asiento?
Lo mas real es a la altura de los hombros estando los motores atrasados un poco para conseguir el angulo optimo. pero dependiendo de que pretendas mover y como lo vayas a construir tambien los puedes colocar debajo. yo mismo los tengo colocados debajo y en la parte delantera del sillon por tema de espacio. Animo y al toro Un saludo
Solo quiero que se mueva el asiento, ya que en mi humilde opinión pienso que tiene que ser mas real así, ya que cuando vas con un coche con las fuerzas generadas solo se mueve el piloto, moviendo solo el asiento haces fuerza con los brazos para intentar mantener la posición y creo que es con lo que puedes sentir las fuerzas ejercidas, si estoy equivocado por favor decídmelo!!!
El copcikt que tengo es de aluminio estructural y lo puedo modificar todo solo aflojando tornillos, así que tengo la posibilidad de montarlo de cualquier manera, había pensado en hacer la fuerza en la base una por estética y otra porque en un futuro( cuando ya no tenga nada mas que ponerle¡!!!!) cambiar el asiento playseat que tengo por un baket sparko o similar, y si hago el soporte arriba ahora, posiblemente lo tendré que modificar cuando cambie el asiento
Pero pienso que el motor tendrá que hacer mas fuerza para empujar la base que no la espalda, porque al tener mas distancia entre donde ejerces la fuerza y el punto donde se tiene que mover (si lo haces en la espalda), la fuerza que tiene que hacer para el mismo movimiento del asiento seria menor, es correcto??
Así que como lo que quiero es que funcione lo mejor posible, me da igual la estética o trabajos futuros si es mejor que haga la fuerza en la espalda
He contactado con el creador del firm SMC3para arduino y ya me ha indicado como adaptar el firm,es solo modificar dos valores en dos lineas del codigo,compilarlo y cargar. ahora ya puedo pasar de x-sim a simtools sin andar cambiando el cableado entre arduino y puentes H.
Si hay alguien interesado lo pongo por aqui para que proveis.
Siempre viene bien tener la información disponible. Aunque nadie lo vaya a utilizar ahora mismo seguro que en algún momento nos animamos a probarlo, así que estaría bien si lo postearas y lo dejaras como referencia. Me imagino que al creador del firmware no le importará.
Petar2 » He contactado con el creador del firm SMC3para arduino y ya me ha indicado como adaptar el firm,es solo modificar dos valores en dos lineas del codigo,compilarlo y cargar. ahora ya puedo pasar de x-sim a simtools sin andar cambiando el cableado entre arduino y puentes H.
Si hay alguien interesado lo pongo por aqui para que proveis.
Un saludo
Claro! siempre es interesante tener varios métodos para la terminación de la electrónica. Así hay más opciones.
¿Puede ser este el post del citado firm y su autor? BETA VERSION SMC v0.7 www.xsimulator.net
Solo teneis que bajaros el firm smc V.070 y modificar esta dos lineas: const int PWMpin1 =9; // PWM output pin for Motor 1 const int PWMpin2 =10; // PWM output pin for Motor 2
Por estas otras: const int PWMpin1 =10; // PWM pin Motor 1 - special mod for Petar2 const int PWMpin2 =9; // PWM pin Motor 2 - special mod for Petar2
Y si los motores giran como deben ya esta,los configurais y a cacharrear.
Si por el contrario giran al contrario,se deberan intercanbiar en las lineas anteriores correspondientes a los pines EN de cada motor los numeros de pin para que se inviertan en el firm y no tener que tocar nada.
Pero vamos,el que use sirnoname 2013 debe bastar con ese cambio pues solo hay que cambiar los pwm para que coincidan en los dos firmware(OJO,que para el sirnoname 2014 no se si valdria).
Este firm se puede configurar para puentes H de un solo pon de direccion o para los que tieneb dos pines de direccion. tan solo cambiando en el codigo un valor. MODE 1 o MODE2. en mi caso uso el mode 1.
Pues así a bote pronto..... con los que usamos el firm "Sirnoname 2014" el cual hace coincidir los pines de la propia Arduino con la Monster creo que podría quedar así para no tener que separarlas usando SMC3 y dejar el cableado (señal) en los pines analógicos de los potenciómetros A4 y A5. Mañana intentaré probarlo :)
RESULTADO UNA VEZ MODIFICADO:
int OutputPort =PORTD; // read the current port D bit mask const int ENApin1 =7; // ENA output pin for Motor H-Bridge 1 (ie PortD bit position) const int ENBpin1 =8; // ENB output pin for Motor H-Bridge 1 (ie PortD bit position) const int ENApin2 =4; // ENA output pin for Motor H-Bridge 2 (ie PortD bit position) const int ENBpin2 =9; // ENB output pin for Motor H-Bridge 2 (ie PortD bit position) const int ENApin3 =2; // ENA output pin for Motor H-Bridge 3 (ie PortD bit position) const int ENBpin3 =3; // ENB output pin for Motor H-Bridge 3 (ie PortD bit position) const int PWMpin1 =5; // PWM output pin for Motor 1 const int PWMpin2 =6; // PWM output pin for Motor 2 const int PWMpin3 =11; // PWM output pin for Motor 3 const int FeedbackPin1 = A4; // Motor 1 feedback pin const int FeedbackPin2 = A5; // Motor 2 feedback pin const int FeedbackPin3 = A3; // Motor 3 feedback pin const int PotInputPin = A2; // User adjustable POT used to scale the motion (if enabled)
Explicación:
PRIMER MOTOR
const int ENApin1 =7; // ENA output pin for Motor H-Bridge 1 (ie PortD bit position) MONSTER D7 DIR1 const int ENBpin1 =8; // ENB output pin for Motor H-Bridge 1 (ie PortD bit position) MONSTER D8 DIR2 const int PWMpin1 =5; // PWM output pin for Motor 1 MONSTER D5 PWN const int FeedbackPin1 = A4; // Motor 1 feedback pin // EN SIRNONAME 2014 ES A4 (( POTENCIOMETRO ))
SEGUNDO MOTOR
const int ENApin2 =4; // ENA output pin for Motor H-Bridge 2 (ie PortD bit position) MONSTER D4 DIR1 const int ENBpin2 =9; // ENB output pin for Motor H-Bridge 2 (ie PortD bit position) MONSTER D9 DIR2 const int PWMpin2 =6; // PWM output pin for Motor 2 D6 PWN const int FeedbackPin2 = A5; // Motor 2 feedback pin // EN SIRNONAME 2014 ES A5 (( POTENCIOMETRO ))
****************************************************************************************************** Aunque la Monster solo es capaz de "controlar" dos motores los otros 4 pines (para un tercer motor) los he dejado asi;
TERCER MOTOR
const int ENApin3 =2; // ENA output pin for Motor H-Bridge 3 (ie PortD bit position) const int ENBpin3 =3; // ENB output pin for Motor H-Bridge 3 (ie PortD bit position) const int PWMpin3 =11; // PWM output pin for Motor 3
const int FeedbackPin3 = A3; // Motor 3 feedback pin (( POTENCIOMETRO ))
LINK: Firm SMC3 V.070 ya retocado para los que tienen fusionado la Arduino + Monster.-
Hay quien usa una monster para cada motor conectandola en full duplex o algo asi,para usarlos al doble de amperaje,asi que asi podrian conectar una tercera.
Muy buenas y felicidades por el magnifico post . Os comento mi idea , voy hacer una estructura de asiento,pedales y monitores . Principalmente para simuladores de vuelo, y con el sistema de 2Dof , algo en este estilo www.floriske.nl/2012/01/321/ , ademas acabo de leer que si se tiene que mover mas peso , es recomendable alimentar con dos fuentes en paralelo, pero, para eso necesito unos motores limpia específicos?, ó con los dos que tengo de desguace de una furgoneta me valen perfectamente?. En el caso de no servir , os agradeceria que me recomendarais unos apropiados. Por otro lado no se, si la configuración , como la web que pongo de referencia , seria buena para un Sim 2Dof de vuelo???